-

箴拓自动化设备(上海)有限公司
主营:等离子粉末堆焊,等离子堆焊,自动化堆焊设备 - 18939866305

箴拓自动化设备(上海)有限公司
主营:等离子粉末堆焊,等离子堆焊,自动化堆焊设备 5
5
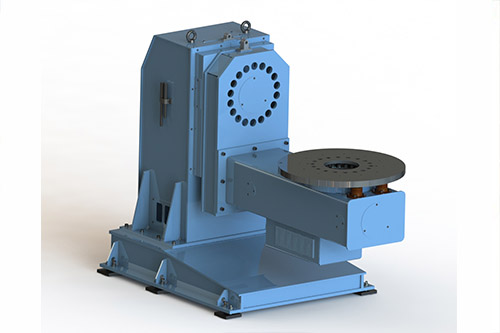
焊接变位机用途
主要用途: 焊接变位机是一种通用、***的以实现环缝焊接为主的焊接设备。可配用氩弧焊机(填丝或不填丝)、熔化较气体保护焊机 (C02/MAG/MIG焊机)、等离子焊机等焊机电源并可与其它机组成自动焊接系统,浙江变位机转台。该产品主要由旋转机头、变位机构以及控制器组成。旋转机头转速可调,具有独立调速电路,浙江变位机转台,拨码开关直接预置焊缝长度,浙江变位机转台。倾斜角度可根据需要调节。焊鎗可气动升降。
焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机焊接变位机
**焊接机头研制
目前通用等离子焊***焊接铝合金空间曲线焊缝时仍然存在着钨极烧损、实时调整动态响应能力不足等问题。为进一步保证和提高VPPA空间曲线焊缝的焊接质量,设计了一种体积、质量(<15kg)合适,精度高,自动化程度高的等离子焊接**机头。等离子焊接机头能在视频监控下完成焊***的姿态调节以及送丝角度和速度的调节。焊***姿态调节包括焊***伸缩机构,焊***轴向旋转机构,焊***平移机构。
通过**焊接机头的控制实现对焊接过程中的熔池状态、电弧形态进行精细的调整,机头的机械定位精度可以达到±0.1mm的水平。这个过程可以通过焊接参数统计分析、焊接过程图像处理及人工智能技术进行自动控制。由于焊接过程的精细调整对控制速度的要求并不高,也可以通过操作者对视频监控和焊接参数监控的观察,人工调整焊接机头的操作。
焊接机器人和变位机协调运动控制系统设技
作为焊接机器人和变位机的协调运动控制的解决方案,我们通常会将变位机和机器人作为一个整体,采用一个具有协调控制功能的控制系统来统一控制,这是一种行之有效的开发方法。然而,不少企业因为之前配置了大量焊接机器人,将原有的单机器人系统改造成具有与独立变位机协调运动的作业系统,就成为了企业的现实需求。因此前述的设计方法对于改造早期的封闭式单机器人应用系统并不适用,能否设计一种方法解决二者之间的协调问题,成为当今焊接机器人研究的热点。