-

箴拓自动化设备(上海)有限公司
主营:等离子粉末堆焊,等离子堆焊,自动化堆焊设备 - 18939866305

箴拓自动化设备(上海)有限公司
主营:等离子粉末堆焊,等离子堆焊,自动化堆焊设备 5
5
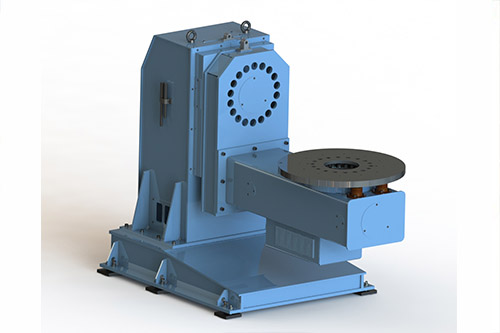
焊接变位机一般由工作台回转机构和反转机构组成,通过工作台的升降,翻转和回转使固定在工作台上的工件达到所需的焊接,装配角度,上海双轴变位机*七轴,工作台回转为变频无极调速,可得道满意的焊接速度。
由于偏心距和重心距的原因,对工件较长和重心位置便宜较多的工件,应选择稍大一点的型号,上海双轴变位机*七轴。标准型焊接变位机不能满足所有工件,选择时务请提供需加工工件的形状及重量,上海双轴变位机*七轴,以及加工工艺。本公司会提供出合适的方案做参考。
自动焊将毫无争议地成为今后我国石油化工管道焊接的主要手段,为从事焊接设备、材料生产和焊接工程施工的企业带来新的机遇和挑战。投入充分、创新能力强的企业将在新的一轮竞争中获得优势,处于行业的良好地位。
在我国,变位机是个相对“年轻”的产品,它对焊接工业来说是不可或缺的,以焊接机器人为**,集成变位机等设备的焊接加工系统**提高了我国工业制造的效率。同时,这种集成性设备的关键技术,也是进一步提高我国焊接装备制造以及焊接加工工艺水平所必须突破的。在这些技术当中,焊接机器人本体和变位机协调控制技术具有**的应用价值,它使需要立焊、仰焊等难以保证焊接质量的施焊操作成为可能,从而保证了焊接质量,提高了焊接生产率和生产过程的安全性。
在未来的焊接机器人系统发展中,变位机协调控制技术的实现和普及需要广大科研单位和制造企业共同推动,其必将成为中国焊接机器人系统发展的新支点。
1、焊接机器人简介
机器人焊接系统主要由以下几部分组成:KUKA机器人及其夹具、焊接变位机、焊机及工作电源系统。该系统的主要工作过程是把固定在焊接变位机上的结构进行旋转、焊接。当焊接操作完毕后,实现结构件复位与焊接机械手复位,经过拆卸夹具,可以实现连续化生产。本*统运行平稳***,重复焊接操作质量稳定,配合不同的夹与编程程序,可以实现多种结构的焊接工作,
焊接变位机,机器人变位机,伺服变位机,伺服转台,机器人外部轴
焊接变位机,机器人变位机,伺服变位机,伺服转台,机器人外部轴
焊接变位机,机器人变位机,伺服变位机,伺服转台,机器人外部轴
焊接变位机,机器人变位机,伺服变位机,伺服转台,机器人外部轴