-

箴拓自动化设备(上海)有限公司
主营:等离子粉末堆焊,等离子堆焊,自动化堆焊设备 - 18939866305

箴拓自动化设备(上海)有限公司
主营:等离子粉末堆焊,等离子堆焊,自动化堆焊设备 5
5
在我国国内焊接变位机的发展已经很成熟完善,焊接变位机我们可以简单的这样去理解它,就是改变焊接位置,可以使立焊、仰焊转变等等统统变为平焊,有效的降低了焊接的难度以及***的完成焊接任务。那么如何检验我们购买的焊接变位机结构是否合理呢?
检查变位机翻转驱动
(1)倾斜驱动应平稳,在负荷下不抖动,整机不得倾覆。负荷Q**过25kg的,应具有动力驱动功能。
(2)应设有限位装置,控制倾斜角度,并有角度指示标志。
(3)倾斜机构要具有自锁功能,在负荷下不滑动,上海双轴变位机变位机,安全可靠。
2、检查变位机旋转驱动电机
(1)旋转驱动电机应实现无级调速,上海双轴变位机变位机,上海双轴变位机变位机,并可实现制动。
(2)在旋转速度范围内,承受载荷时转速波动上下不**过5%。
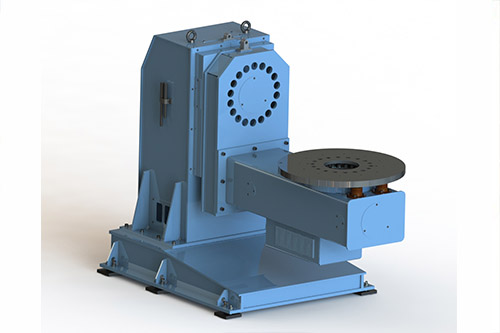
L型双回转焊接变位机 该种变位机其工作装置为L型,有两个方向的回转自由度,且两个方向都可以±360°任意回转。此变位机与其他类型变位机相比,开敞性好,容易操作。L型双回转焊接变位机在推土机后桥箱焊接中的成功使用,而且使用效果很好,深受现场操作工的欢迎。
双座式头尾双回转焊接变位机 与**种变位机相比,被焊结构件在另外一个空间又增加一个旋转自由度。这种形式的变位机焊接空间大,工件可被旋转到需要的位置,设计先进,目前已在工程机械许多厂家成功使用。双座式头尾双回转变位机在山推挖掘机X架上的使用。
多轴联动VPPA焊接装备系统集成与应用
采用站立式机器人焊接工作站系统。6轴机器人安装于三维移动装置上,工件安装于2轴变位机上。三维移动装置可实现高向(z轴)、横向(x轴)、纵向(y轴)的独立调节,增加机器人移动范围,使其有效焊接范围能够满足产品焊接的要求。通过对6轴机器人+三维移动装置+双轴变位机系统的集成,实现对焊***与焊缝相对位置的实时控制,使VPPA焊***与焊缝的相对位置在复杂曲线焊缝焊接过程中,始终处于垂直立向上的关系。研制完成的多轴联动变极性等离子弧大型自动化焊接装备