-

箴拓自动化设备(上海)有限公司
主营:等离子粉末堆焊,等离子堆焊,自动化堆焊设备 - 18939866305

箴拓自动化设备(上海)有限公司
主营:等离子粉末堆焊,等离子堆焊,自动化堆焊设备 5
5
1、焊接机器人简介
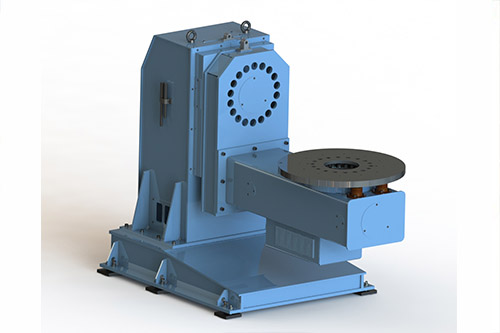
机器人焊接系统主要由以下几部分组成:KUKA机器人及其夹具、焊接变位机、焊机及工作电源系统。该系统的主要工作过程是把固定在焊接变位机上的结构进行旋转、焊接。当焊接操作完毕后,实现结构件复位与焊接机械手复位,经过拆卸夹具,可以实现连续化生产。本*统运行平稳***,浙江变位机外部轴,重复焊接操作质量稳定,配合不同的夹与编程程序,可以实现多种结构的焊接工作,
焊接变位机,机器人变位机,伺服变位机,伺服转台,机器人外部轴
焊接变位机,浙江变位机外部轴,机器人变位机,伺服变位机,伺服转台,机器人外部轴
焊接变位机,浙江变位机外部轴,机器人变位机,伺服变位机,伺服转台,机器人外部轴
焊接变位机,机器人变位机,伺服变位机,伺服转台,机器人外部轴
国外大型结构件的焊接一般应用机械手,从国内目前的工艺现状及设备投入情况,完全用焊接机器人代替手工焊接作业的条件还不成熟。但是如果没有焊接变位机,对于复杂结构件内的一些立焊缝、仰焊缝等单纯靠人工调整至容易焊接的平焊或船焊位置是不可能的。另外,工程机械大部分结构件很不规则,如推土机的后桥箱、台车架、挖掘机的动臂等工件,焊缝复杂,外形大且质量较重,靠行车或其他吊装设备人工翻转,不仅频繁占用吊装设备,焊接效率低,而且现场操作较端困难,存在一定的安全***,但使用焊接变位机这些问题均能够得到有效解决。为此,随着焊接技术的发展,相信焊接变位机在工程机械的应用会越来越普遍。
近期我国有一些铁路车辆厂开始引进带有激光视觉传感器的焊接机器人,不仅能自动寻找和**接缝,有的还能对坡口(间隙)宽度的变化自动进行一定的自适应调节。
今后带有视觉传感器的焊接机器人将会不断增多,尤其是对大型工件的焊接,这是一个重要的发展方向。因为大型工件的焊接自动化是比较困难的,工件的尺寸大、重量重,难以精确装配,过去一直采用手工焊或气体保护半自动焊。
焊接专机是一种刚性或半刚性的自动化焊接设备,它通过电(自动控制系统)、焊(先进的焊接工艺、材料、设备)、机(夹具、装卡定位及运动系统)的**集成来实现对待焊工件的高质量、高效率、低成本的大规模批量化生产,它不同于柔性自动化的焊接机器人。
企业必须根据生产情况和产品要求来选择是用专机还是机器人,而不能笼统认为机器人是高水平的自动化,专机就是较低水平的自动化。