-

箴拓自动化设备(上海)有限公司
主营:等离子粉末堆焊,等离子堆焊,自动化堆焊设备 - 18939866305

箴拓自动化设备(上海)有限公司
主营:等离子粉末堆焊,等离子堆焊,自动化堆焊设备 5
5
研发智能化程度更高的全位置自动焊设备:目前的全位置自动焊设备对坡口的质量和组对精度要求非常高,而现场由于诸多因素的影响,有相当数量的焊口无法满足自动焊的要求。因此,需要研制智能化程度更高的焊机来满足这种需要。
研制效率更高的焊机:更高的焊接效率是自动焊技术研发工作的持续追求。中国石油管道局研究院在研制新型自动焊机方面取得了一些实质性进展,值得借鉴:①单弧双丝全位置自动焊机。这是利用国外单弧双丝焊机开发的一种全位置自动焊机,具有坡口小,熔敷率高,速度快的优点。②自保护药芯焊丝全位置自动焊机,广州松下变位机。该技术利用药芯焊丝自保护焊抗风能力强的特点,广州松下变位机,广州松下变位机,非常适于户外作业。③激光/电弧复合全位置自动焊机。该技术利用激光一次穿透能力强的特点,利用熔化较气体保护焊与其结合保证焊缝获得足够的热输入,实现大厚度管道***焊接(
多轴联动VPPA焊接装备系统集成与应用
采用站立式机器人焊接工作站系统。6轴机器人安装于三维移动装置上,工件安装于2轴变位机上。三维移动装置可实现高向(z轴)、横向(x轴)、纵向(y轴)的独立调节,增加机器人移动范围,使其有效焊接范围能够满足产品焊接的要求。通过对6轴机器人+三维移动装置+双轴变位机系统的集成,实现对焊***与焊缝相对位置的实时控制,使VPPA焊***与焊缝的相对位置在复杂曲线焊缝焊接过程中,始终处于垂直立向上的关系。研制完成的多轴联动变极性等离子弧大型自动化焊接装备
1、焊接机器人简介
机器人焊接系统主要由以下几部分组成:KUKA机器人及其夹具、焊接变位机、焊机及工作电源系统。该系统的主要工作过程是把固定在焊接变位机上的结构进行旋转、焊接。当焊接操作完毕后,实现结构件复位与焊接机械手复位,经过拆卸夹具,可以实现连续化生产。本*统运行平稳***,重复焊接操作质量稳定,配合不同的夹与编程程序,可以实现多种结构的焊接工作,
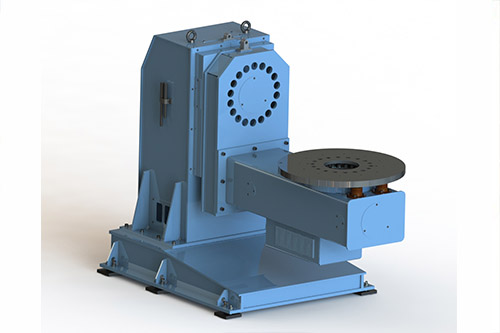
焊接变位机,机器人变位机,伺服变位机,伺服转台,机器人外部轴
焊接变位机,机器人变位机,伺服变位机,伺服转台,机器人外部轴
焊接变位机,机器人变位机,伺服变位机,伺服转台,机器人外部轴
焊接变位机,机器人变位机,伺服变位机,伺服转台,机器人外部轴